Особенности технологий X.25, FRAME RELAY, PDH, SDH
Технология X.25
Глобальные сети X.25 основаны на коммутации пакетов, и долгое время являлись единственными сетями с коммутацией пакетов, гарантирующими готовность. Структурно сеть X.25 состоит из аппаратуры передачи данных (АПД, англ. Data Terminal Equipment, DTE) — терминалы, компьютеры и т.д., аппаратуры окончания канала данных (АОКД, англ. Data Circuit-Terminating Equipment, DCE) —телекоммуникационного оборудования, модемов и т.п. и центров коммутации пакетов (ЦКП, англ. Packet Switching Exchange, PSE). Кроме того, применяются сборщики-разборщики пакетов (СРП, англ. Packet Assembler/Disassembler, PAD), буферизующие потоки байтов от асинхронных “тупых” терминалов и преобразующие их в потоки пакетов (и производящие обратные преобразования).
Рекомендации ITU-T X.25 «Интерфейс между оконечным оборудованием данных и аппаратурой передачи данных для терминалов, работающих в пакетном режиме в сетях передачи данных общего пользования» охватывают три нижних уровня модели ISO/OSI.
На физическом уровне определены последовательные синхронные интерфейсы X.21 и X.21bis (допустимо использование интерфейсов V.24, V.35, RS-232C, RS-449, G.703). Физический уровень не контролирует правильность передачи.
Интерфейс X.21
Цепь сигнальной земли G (англ. ground) устанавливает общий уровень, относительно которого измеряются уровни сигналов. Цепь передачи T (англ. transmit) используется для передачи данных от АПД к АОКД, т.е. от узла в сеть. Цепь приема R (англ. receive) используется для приема данных АПД от АОКД. Цепь управления C (англ. control) используется АПД для того, чтобы сообщить АОКД состояние интерфейса: на протяжении всего времени передачи данных по цепи T АПД поддерживает цепь C в активном состоянии. Аналогичную функцию несет цепь индикации I (англ. indication): АОКД переводит ее в активное состояние, чтобы сообщить АПД о передаче данных по цепи R.
По цепи битовой синхронизации S (англ. signal element timing) АОКД постоянно передает синхросигнал. Цепь байтовой синхронизации B (англ. byte timing) также управляется АОКД: цепь B активна во время передачи всех битов байта, кроме последнего, а при передаче последнего бита — пассивна.
На канальном уровне сеть гарантирует доставку, обеспечивает целостность данных и управление потоком. Канальный уровень реализуется подмножеством протокола HDLC — протоколом LAP-B (Link Access Protocol — Balanced). Протокол LAP-B функционирует подобно протоколу LLC2 (IEEE 802.2), то есть требует передачи квитанций и выполняет повторную передачу потерянных пакетов.
На сетевом уровне определен протокол X.25/3 (англ. Packet Layer Protocol, PLP), описывающий обмен пакетами между АПД и СПД. Он выполняет функции маршрутизации пакетов, установления и разрыва виртуального канала, управления потоком пакетов.
После установления соединения АПД с коммутатором на канальном уровне, АПД передает пакет запроса виртуального соединения с другим АКП (англ. Call Request), который маршрутизируется коммутаторами, прокладывая виртуальный канал.
Протокол X.25 допускает длину поля данных пользователя в пакете до 4096 байт, но предпочтительной является длина по умолчанию 128 байт.
Адресация узлов в сети X.25, не связанной с другими сетями, может быть произвольной (до 16 байт на адрес). Для сетей передачи общего пользования Рекомендация ITU-T X.121 определяет международную систему нумерации адресов. Первая цифра указывает на формат остальной части адреса: «0» — полный международный сетевой адрес (три следующих десятичных цифры указывают на страну, например, 250 или 251 — Россия, затем одна цифра под номер сети в стране, затем до десяти цифр номер узла в сети), «9» — полный международный телефонный номер (следующие цифры содержат телефонный код страны, например, 7 — Россия, затем код города и номер телефона в городе, всего до 14 цифр).
Производительность коммутаторов X.25 обычно составляет несколько тысяч пакетов в секунду, что существенно ограничивает пропускную способность сети. Это связано с тем, что протоколы X.25 предназначались для использования на низкоскоростных линиях связи с высоким уровнем помех, поэтому каждый коммутатор должен подтвердить каждый принятый пакет, выполнить разбор пакета для определения дальнейшего пути и повторную его упаковку в кадр LAP-B. При этом задержка коммутации составляет сотни миллисекунд.
Технология Frame Relay
Сети с ретрансляцией кадров (англ. Frame Relay) представляют собой сети с коммутацией пакетов, ориентированные на цифровые линии связи со скоростью до 45 Мбит/с (изначально — до 2 Мбит/с). Frame Relay работает в дейтаграммном режиме с малыми задержками, не гарантирует доставку, целостность данных и управление потоком. При этом сети Frame Relay могут гарантировать среднюю скорость передачи данных по виртуальному каналу при допустимых пульсациях трафика (подобные гарантии качества обслуживания сегодня предоставляет только технология ATM).
Технология Frame Relay происходит из сетей ISDN, где в начале 1980-х она была стандартизована как одна из служб пакетного режима. Frame Relay предназначена для динамического разделения пропускной способности физического канала между отдельными процессами передачи данных (фактически, сети Frame Relay используются не столько для соединения отдельных узлов, сколько для соединения отдельных локальных сетей). При использовании Frame Relay предполагается, что канал передачи данных достаточно надежен, что позволяет перенести контроль ошибок и управление потоком на вышележащие уровни. В результате кадры Frame Relay несут минимальное количество служебной информации и максимально быстро обрабатываются сетевым оборудованием.
Frame Relay обеспечивает установление постоянных (англ. Permanent Virtual Circuit, PVC) и коммутируемых (англ. Switched Virtual Circuit, SVC) виртуальных каналов. В отличие от X.25, Frame Relay передает кадры только по протоколам физического и канального уровня, не затрагивая сетевой уровень.
Протокол канального уровня LAP-F является упрощенной версией протокола LAP-D, работающего в сетях ISDN по D-каналам. В основном режиме LAP-F кадры передаются без преобразований и контроля, как при коммутации в локальных сетях. Хотя для кадров используется синхронный формат HDLC с длиной поля данных до 4 Кбайт и двухбайтовым полем CRC, значение CRC коммутаторами не проверяется. Пакеты могут аннулироваться в случае перегрузки сети.
Идентификация виртуального канала, к которому относится пакет, происходит по 10-битовому полю заголовка кадра DLCI (англ. Data Link Connection Identifier). При необходимости размер DLCI можно довести до 22 бит.
Основу сети Frame Relay образуют специализированные коммутаторы — FRAD (англ. Frame Relay Access Device, устройство доступа к сети с ретрансляцией кадров).
Структура кадра Frame Relay
Структура кадра Frame Relay приведена на рис. 1.

Рис. 1. Структура кадра Frame Relay.
Поля «Флаг» обозначают начало и конец кадра. Двоичное значение этого поля — ‘01111110’. Поле «Данные пользователя» может иметь размер до 4056 байт и предназначено для данных, передаваемых протоколами верхних уровней. Поле «Контрольная сумма» содержит 16-ти разрядную контрольную сумму для полей «Заголовок» и «Данные пользователя». Поле «Заголовок» несет информацию, необходимую для управления передачей данных и имеет формат, приведенный на рис. 2.

Рис. 2. Структура поля Заголовок кадра Frame Relay.
Поля EA0 И EA1 (англ. Effective Address, исполнительный адрес) управляют размером заголовка. Если бит EA сброшен (EA0), то в следующем байте содержатся дополнительные биты DLCI. Если бит EA установлен (EA1), то данный байт — последний в заголовке. Минимальный заголовок приведен на рис. и состоит из двух байт, в первом из которых бит EA сброшен, а во втором — установлен. Возможны также трех-и четырехбайтовые заголовки, в которых все байты, кроме последнего, имеют признак EA0, а последний — EA1.
Поле DLCI (англ. Data Link Connection Identifier, идентификатор виртуального соединения) используют коммутаторы (FRAD) для указания друг другу какие данные передаются в этом кадре. При двухбайтовом заголовке поле имеет длину 10 бит, при трехбайтовом — 16 бит, а при четырехбайтовом — 22 бита. Стандарт резервирует интервалы значений DLCI 0..15 и 992..1023 для служебных целей, внутрисетевых соединений и управления канальным уровнем. Пользователями для нумерации PVC и SVC могут использоваться 976 идентификаторов DLCI с номерами от 16 до 991.
Поля FECN (англ. Forward Explicit Congestion Notification, явное уведомление о заторе в прямом направлении) и BECN (англ. Backward Explicit Congestion Notification, явное уведомление о заторе в обратном направлении) используются коммутаторами при возникновении перегрузок в сети. Если коммутатор получает больше кадров, чем он может обработать, то он устанавливает в кадрах, отправляемых источнику избыточных данных, бит BECN, а в кадрах, отправляемых получателю избыточных данных — бит FECN. Поступление кадра с установленным битом BECN означает, что часть выдаваемых кадров может быть отброшена коммутаторами и нужно замедлить выходной поток. Поступление кадра с установленным битов FECN означает, что в данном потоке возможны (хотя и не обязательно произойдут) выпадения кадров.
Поле DE (англ. Discard Eligibility, приемлемость удаления) устанавливается отправителем кадра и означает, что данный кадр при возникновении перегрузок можно удалить.
Поле C/R (англ. Command/Reply, команда/ответ), когда равно 1, в кадрах, содержащих команды, требует, чтобы на команду был дан ответ, а в кадрах, содержащих ответы, указывает на последний кадр ответа.
Плезиохронная цифровая иерархия
Плезиохронная цифровая иерархия (англ. Plesiochronous Digital Hierarchy, PDH) разработана корпорацией AT&T (Bell Labs) в 1960-х годах для передачи множества потоков оцифрованной голосовой информации по каналам связи. Основная цель разработки заключалась в повышении скорости многоканальной связи крупных телефонных коммутаторов друг с другом.
Цифровое представление звуковых сигналов
Канал, выделяемый телефонными сетями для одного соединения, имеет полосу пропускания 4 кГц, достаточную для приемлемой передачи человеческой речи. Соответственно, характеристики базового цифрового канала выбирались так, чтобы по одному такому каналу можно было передавать данные одного телефонного соединения. В соответствии с теоремой Котельникова-Найквиста, для того, чтобы было можно восстановить исходный сигнал, частота дискретизации должна быть не меньше 2*4 кГц = 8 кГц. Для приемлемого представления человеческой речи достаточно 12-ти бит на отсчет, что соответствует 4096-ти различимым уровням сигнала, а логарифмическое преобразование позволяет снизить разрядность отсчетов до 8 бит, сохраняя субъективное качество сигнала. Логарифм является положительной функцией только при аргументе, превышающем единицу, соответственно, для диапазона аргументов от 0 до 1 необходимо использовать какую-то другую функцию. В Европе и США используют разные преобразования — A-зависимость и µ-зависимость соответственно. В Европе для «малых» аргументов используют линейную функцию y ~ ax, а для «больших» — непосредственно логарифмическую: y = (1+ln A x)/(1+ln A), где A = 87,6. В США сдвигают график функции на единицу в сторону оси ординат: y ~ log(1+ µx).
Поскольку количество разных аргументов невелико (4096), на практике не вычисляют для каждого отсчета соответствующий логарифм, а хранят заранее подготовленную таблицу соответствий аргументов и значений функции.
Мультиплексор T1 имеет 24 аналоговых канала и один цифровой. Он постоянно перебирает аналоговые каналы (обращаясь к каждому из них 8000 раз в секунду, т.е. с частотой 8 кГц), оцифровывает поступающие аналоговые данные (телефонные разговоры) по 12 бит на отсчет, выполняет логарифмическое преобразование и выдает полученный байт данных в цифровой канал. Этот единственный байт составляет кадр DS-0. Время, отводимое на передачу одного байта, принадлежащего одному аналоговому каналу, называется таймслотом (англ. timeslot временной интервал). Отдельный таймслот отводится для синхронизации. В Т1 для синхронизации используется один бит (F-бит, англ. Framing bit) поочередно ноль и единица. Таким образом, по одному цифровому каналу T1 передаются 24 базовых голосовых канала, а группа, состоящая из 24 байт и F-бита, называется кадром DS-1. За одну секунду передается 8000 кадров DS-1. Суммарная скорость канала T1 составляет (24*8+1)*8=1544 Кбит/с.
Если по какому-либо из аналоговых каналов не поступают данные, его таймслот остается закрепленным за ним, соответственно, часть пропускной способности цифрового канала расходуется впустую.
Демультиплексор T1 выполняет обратную задачу — в него поступает поток кадров DS-1, из которых он извлекает по одному байту для каждого из 24-х аналоговых каналов, выполняет цифро-аналоговое преобразование и выдает его результат в канал.
Управляющая информация в T1 передается младшим разрядом байтов данных (поскольку байт представляет собой значение замера голоса, было сочтено, что искажение младшего разряда не должно быть замечено слушателем). В ранних версиях младший бит каждого байта был служебным, фактически передавались 7-битовые байты, а скорость передачи пользовательских данных составляла 56 Кбит/с. Затем для служебных целей использовался только каждый шестой кадр: в пяти кадрах в каждом байте передаются восемь бит пользовательских данных, а в шестом — только семь.
Четыре канала T1 объединяются в канал T2 (следующий уровень иерархии PDH), семь каналов T2 — в T3, шесть каналов T3 — в T4. Аппаратура T1, T2, T3 и T4 может взаимодействовать, образуя сеть с иерархией каналов.
Кадр DS-2 состоит из четырех кадров DS-1, разделенных F-битами, а сами кадры DS-2 разделяются 12 служебными синхробитами.
Позже эта технология (с некоторыми отличиями от оригинального варианта) была стандартизована ITU-T (в то время CCITT). В Америке, Канаде и Японии используется исходная американская версия, а в Европе — стандарт ITU-T. Базовый канал в обеих версиях имеет скорость 64 Кбит/с. Основное отличие европейских каналов — в кратности вхождения низкоскоростных каналов в канал следующего уровня, и, соответственно, их скорости. Канал E1 (аналог T1) состоит из 30 базовых каналов, канал E2 — из 4 каналов E1, канал E3 — из 4 каналов E2, а канал E4 — из 4 каналов E3.
Стандарт ITU-T (G.700-G.706) отказался от использования отдельных разрядов байтов пользовательских данных для передачи служебной информации. Кадр DS-1, передаваемый по каналу E1, состоит из 30 байт пользовательских данных (по одному из каждого базового канала) и 2 служебных байт. Суммарная скорость составляет 32*8*8=2048 Кбит/с.
В технологии PDH (стандарт ITU-T G.704) все уровни скоростей (и форматы кадров для этих уровней) называются DS-n, где n — номер уровня (DS — от англ. Digital Signal, цифровой сигнал).
В таблице 1 приведены сводные данные об уровнях скоростей американской и европейской плезиохронных иерархий.
Таблица 1. Уровни скорости PDH

На физическом уровне технология PDH (зафиксированная в стандарте ITU-T G.703) допускает использование витой пары, коаксиального и волоконно-оптического кабеля. В каналах T1/E1 используется преимущественно витая пара (две пары с волновым сопротивлением 120 Ом, разъем RJ-48), данные передаются с использованием кодов AMI/B8ZS (T1) и HDB3 (E1). Для каналов T2/E2 обычно используется коаксиальный кабель с волновым сопротивлением 75 Ом, а для T3/E3 — коаксиальный или волоконно-оптический кабель.
Основная проблема при использовании PDH — сложность выделения (демультиплексирования) пользовательских каналов. Это связано с использованием служебных бит синхронизации между кадрами. Если нужно выделить один базовый канал из кадров канала T3, нужно произвести полное демультиплексирование в кадры T2, кадр T2 — в кадры T1, а из кадра T1 выделить данные одного базового канала. Для уменьшения количества операций мультиплексирования используются специальные приемы, усложняющие работу сети и требующие специальной настройки.
Другой недостаток PDH — слабые средства управления сетью, недостаточное количество информации о состоянии канала, отсутствие процедур поддержки отказоустойчивости.
Наконец, предел скорости технологии PDH — 274 Мбит/с (T4) и 139 Мбит/с (E4), в то время, как современные кабели позволяют передавать данные со скоростями на порядок выше.
Синхронная цифровая иерархия
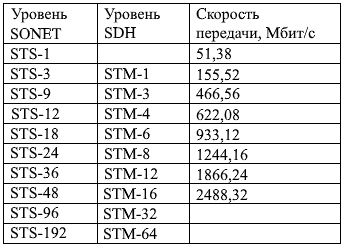
Синхронная цифровая иерархия (англ. Synchronous Digital Hierarchy, SDH) разработана компанией Bellcore в середине 1980-х годов под названием «Синхронные оптические сети» (англ. Synchronous Optical NETs, SONET), а в 1988 году была стандартизована CCITT и ANSI (G.707-G.709). Европейский (CCITT) и американский (ANSI) стандарты совместимы на скоростях, начиная с 155,52 Мбит/c (кадры STM-1 и STS-3 соответственно). В стандарте ANSI, кроме, того предусмотрена скорость 51,38 Мбит/с (кадр STS-1).
Основное достоинство SDH по сравнению с PDH — прозрачность мультиплексирования и демультиплексирования. Кадры SDH всех уровней имеют такую структуру, что позволяют легко, не разбирая на составляющие весь высокоскоростной поток, выделять и вставлять данные, относящиеся к требуемому низкоскоростному каналу. Для этого используется побайтовое чередование при мультиплексировании.
Сети SDH/SONET рассматриваются как состоящие из пяти уровней (см. рис. 3).
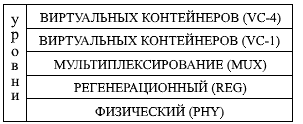
Рис. 3. Модель SDH/SONET.
Нижний уровень — физический (в стандарте он называется фотонным), он соответствует среде передачи. Как правило, в качестве среды передачи используется оптоволокно, но допустимы также радио и спутниковые каналы. Второй уровень — регенерационный, он соответствует линии (англ. line) — участку сети между регенераторами (восстановителями сигнала). Для передачи служебных сигналов на этом уровне в кадре предусмотрена группа служебных байтов — заголовок секции регенерации (англ. Regeneration Section OverHead, RSOH), занимающая первые девять байт в первых трех строках кадра STM-1. Третий уровень — мультиплексирования, он соответствует секции (англ. section) — участку сети между мультиплексорами. Для передачи служебных сигналов на этом уровне в кадре предусмотрена группа служебных байтов — заголовок секции мультиплексирования (англ. Multiplex Section OverHead, MSOH), занимающая первые девять байт с пятой по девятую строку кадра STM-1. Два следующих уровня — виртуальных контейнеров VC-4 и VС-1 — соответствуют тракту (англ. path) и выполняют передачу данных между двумя терминалами. Виртуальные контейнеры VC-4 используются для передачи данных ATM или высокоскоростных каналов PDH (E4), а VC-1 — для передачи низкоскоростных каналов (T1/E1). Контейнер VC-1 имеет две разновидности: VC-11 для T1 (1544 Кбит/с) и VC-12 для E1 (2048 Кбит/c).
Мультиплексирющиеся в синхронный поток кадров низкоскоростные (плезиохронные, ATM, IP) потоки, а также каналы, по которым они передаются, в терминологии SHD/SONET называются “приточными” (англ. ).
В синхронных сетях используется четыре типа оборудования: регенераторы, мультиплексоры терминалов, добавляющие/извлекающие мультиплексоры, цифровые кросс-панели.
Регенератор (англ. regenerator) предназначен для восстановления проходящего через него ослабленного и расплывшегося цифрового сигнала. Мультиплексор терминалов (англ. terminal multiplexer) используется для объединения входящих плезиохронных и синхронных потоков в более высокоскоростной поток кадров STM-N. Добавляющий/извлекающий мультиплексор (англ. add/drop multiplexer, ADM) пропускает через себя высокоскоростной поток кадров STM-N и имеет возможность добавлять в него либо извлекать из него плезиохронные и низкоскоростные синхронные потоки. Из таких мультиплексоров можно строить надежные кольцевые сети с автоматическим переключением в случае отказа одной из линий. Цифровой кросс-коннектор (англ. digital cross-connect, DXC) — это наиболее многофункциональное оборудование SDH. Она позволяет упаковывать/распаковывать плезиохронные потоки в виртуальные контейнеры и выполнять коммутацию контейнеров разных уровней. Все перечисленные типы оборудования SDH, показанные на рис. 4, поддерживают удаленное управление и мониторинг.
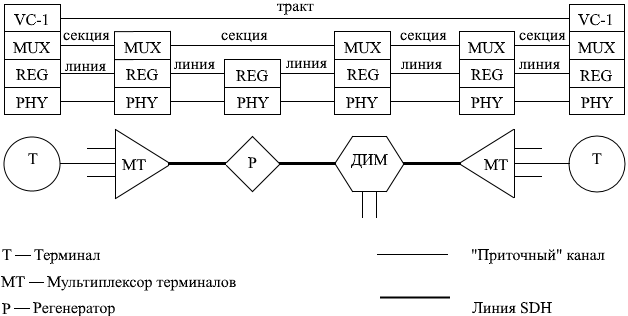
Рис. 4. Типы оборудования SDH.
В качестве физической среды в SDH/SONET обычно используется одномодовое оптоволокно и лазерные приемопередатчики на длинах волн 1310 нм и 1550 нм. Пользователи сети работают с электрическими сигналами, а по сети физически передаются оптические. Для повышения стабильности лазерных передатчиков желательно, чтобы в потоке передаваемых битов было одинаковое количество нулей и единиц, поэтому в процессе преобразования электрических сигналов в оптические выполняется скремблирование.
Кадр уровня STM-1 (англ. Synchronous Transport Module, модуль синхронной передачи) имеет длину 2430 байт, время его передачи составляет 125 мс, что соответствует скорости 155,52 Мбит/с. Кадр состоит из 9 строк по 270 байт, первые 9 байт в каждом ряду содержат служебные данные (см. рис. 5 и таблицу 2), остальные байты каждой строки (с 10 по 270) переносят полезные данные. Каждый байт полезных данных соответствует потоку 64 Кбит/c. Кадр передается построчно, начиная с верхнего левого угла и заканчивая правым нижним углом. Передача каждого байта начинается со старшего бита. Скорость передачи полезных данных составляет 150,34 Мбит/с, соответственно, в кадрах STM-1 может передаваться любой из плезиохронных потоков до E4 (140 Мбит/с) включительно.

Рис. 5. Структура кадра STM-1.
Таблица 2. Служебные байты кадра STM-1 и их функции

К каждому виртуальному контейнеру прикрепляется заголовок тракта (англ. Path OverHead, POH), предназначенный для мониторинга качества передачи и указания типа контейнера. Формат заголовка тракта различен для разных контейнеров (см. рис. 6, 7).
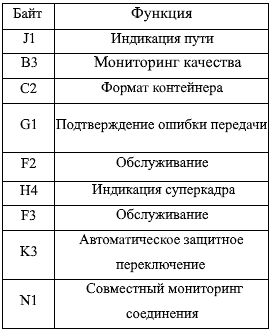
Рис. 6. VC-3/4 POH.
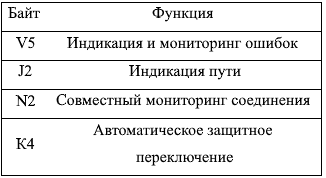
Рис. 7. VC-11/12 POH.
Синхронные сети предназначены для передачи как потоков плезиохронной иерархии и современных ATM-сетей, так и непосредственно потоков IP-дейтаграмм.
Уровни иерархии SDH/SONET перечислены в таблице 3.
Таблица 3. Уровни SDH/SONET.